alt="微信二维码">
alt="微信二维码">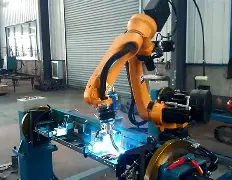
焊接是机器人结构件连接的主要工艺,焊缝质量直接影响机器人的承载能力与疲劳寿命。针对不同的缺陷类型与应用场景,需采用多样化的检测方法。本文将解析机器人焊接质量检测的常用方法及其适用范围。
一、无损检测(NDT):不破坏工件
无损检测适用于成品或半成品的批量筛查,旨在发现表面及内部缺陷。
- 超声波检测(UT):利用声波反射原理,有效检测焊缝内部的气孔、夹渣及未熔合缺陷,穿透力强。
- 射线检测(RT):通过 X 射线或伽马射线成像,直观显示内部缺陷形态,适用于关键受力焊缝。
- 磁粉检测(MT):针对铁磁性材料,高效发现表面及近表面的裂纹。
二、破坏性测试:评估力学性能
通过取样破坏焊缝,直接测试其力学性能与微观组织。
| 测试项目 | 检测目的 | 适用场景 |
|---|---|---|
| 拉伸试验 | 测定焊接接头的抗拉强度 | 工艺评定、型式试验 |
| 弯曲试验 | 评估焊缝的塑性及结合质量 | 检测焊缝根部未焊透 |
| 金相检验 | 观察焊缝组织、熔深及热影响区 | 失效分析、工艺优化 |
三、外观与尺寸检查
最基础也是最直接的检测手段,通常作为第一道关卡。
- 视觉检查:检查焊缝表面是否有咬边、焊瘤、弧坑裂纹等缺陷。
- 尺寸测量:使用焊缝量规测量余高、焊脚尺寸是否符合图纸要求。
总结
机器人焊接质量检测需结合无损与破坏性测试方法。无损检测保障成品完整性,破坏性测试验证工艺可靠性。综合应用多种手段,才能全面把控焊接质量,消除安全隐患。
关于汇策晟安检测
汇策晟安检测配备先进的无损检测设备与力学试验室,可提供全面的焊接质量检测服务。我们的团队持有 II 级及以上无损检测证书,能够精准识别各类焊接缺陷。无论是工艺评定还是成品验收,我们都能提供专业的检测方案与报告,助力客户提升焊接制造水平。