alt="微信二维码">
alt="微信二维码">
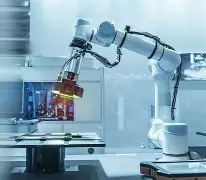
工业机器人在自动化生产线上的表现直接取决于其运动控制的精准度。轨迹精度作为衡量机器人性能的核心指标,影响着焊接、涂胶、装配等工艺的质量稳定性。然而,在实际应用中,机械磨损、控制算法偏差及环境因素均可能导致轨迹偏离预期。本文将深入解析机器人轨迹精度测试的标准流程与关键技术要点,为性能评估提供科学依据。
一、测试环境与设备准备
精准的测试始于严谨的环境搭建。测试前需确保机器人处于热平衡状态,并在无振动、温度稳定的环境中进行。
核心设备要求:
- 激光跟踪仪:用于高精度捕捉机器人末端执行器的空间坐标。
- 标准测试程序:预置符合 ISO 9283 标准的轨迹运动程序。
- 数据采集系统:实时记录位置偏差、速度波动及时间同步数据。
设备安装需稳固,参考坐标系应与机器人基座坐标系严格对齐,以消除系统误差。
二、关键测试指标解析
轨迹精度并非单一数值,而是由多个维度指标共同构成。
| 指标名称 | 定义 | 影响因素 |
|---|---|---|
| 轨迹准确度 | 实际轨迹与指令轨迹之间的平均距离偏差 | 运动学参数标定、控制算法 |
| 轨迹重复精度 | 多次运行同一轨迹时,实际路径的一致性程度 | 机械间隙、伺服驱动稳定性 |
| 拐角偏差 | 机器人在路径转折处的超调或欠调量 | 加减速设置、惯性补偿 |
三、标准测试流程步骤
遵循标准化流程是确保测试结果可比性的关键。
- 预热运行:机器人以额定速度运行典型程序至少 30 分钟,消除冷机误差。
- 路径编程:加载包含直线、圆弧及复杂曲线的标准测试路径。
- 数据采集:启动激光跟踪仪,同步记录机器人末端实际位置与理论位置。
- 重复测试:同一轨迹重复运行至少 5 次,以评估重复精度。
- 数据分析:计算最大偏差、平均偏差及标准差,生成精度报告。
四、常见误差来源与优化
测试中发现的误差通常源于机械结构或控制参数。
- 机械间隙:减速器磨损导致反向运动时出现空程,需定期维护或补偿。
- 刚度不足:负载变化引起臂杆变形,需优化结构刚度或调整控制增益。
- 参数标定:DH 参数不准确会导致模型误差,需进行高精度标定。
总结
机器人轨迹精度测试是验证运动性能不可或缺的一环。通过标准化的测试流程、高精度的测量设备以及多维度的指标分析,可以准确识别机器人的性能瓶颈。定期的精度测试不仅有助于维持生产质量,还能为预防性维护提供数据支持,确保自动化产线的高效运行。
汇策晟安检测作为专业的第三方检测机构,提供全面的机器人性能测试服务。我们具备先进的激光跟踪测量系统及符合国际标准的测试环境,可开展轨迹精度、重复定位精度、速度特性等全方位检测。我们的服务涵盖机器人性能评估、运动控制分析、可靠性验证及失效分析,旨在帮助制造企业优化机器人选型与应用,提升自动化系统的整体稳定性与竞争力。